Vertical Take-Off and Landing Aerial Vehicle with Retractable Wings
A compact VTOL that deploys a rigid airfoil wing for efficient forward flight.
Team

Overview
A morphing-wing VTOL built to be both compact and efficient.
Classic multirotors are agile but energy-hungry in forward flight. Classic fixed-wings are efficient but bulky and constrained in tight environments.
This project explores a different trade-off: a VTOL that keeps a small footprint for hover and navigation through narrow openings, then deploys rigid wings to transition to airplane-like cruise.
The team delivered a full prototype architecture (mechanics + aero + electronics) and validated the wing concept experimentally, highlighting what works today—and what must change to reach free-flight VTOL transitions.
System Concept
How the vehicle is meant to transition between modes.
In hover mode, wings retract to reduce span and simplify close-range maneuvering.
When an open corridor is available, the pilot commands wing deployment; the vehicle accelerates forward and progressively reduces hover-thrust as wing lift builds up—enabling a continuous hover→cruise transition (and the reverse sequence for cruise→hover).
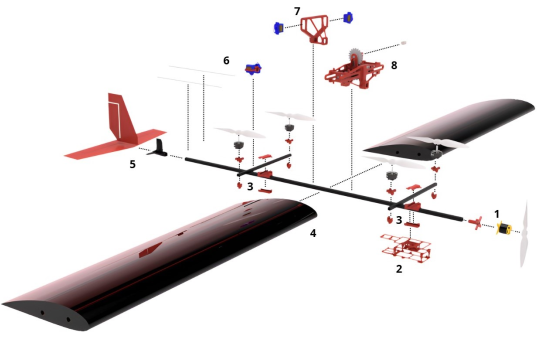
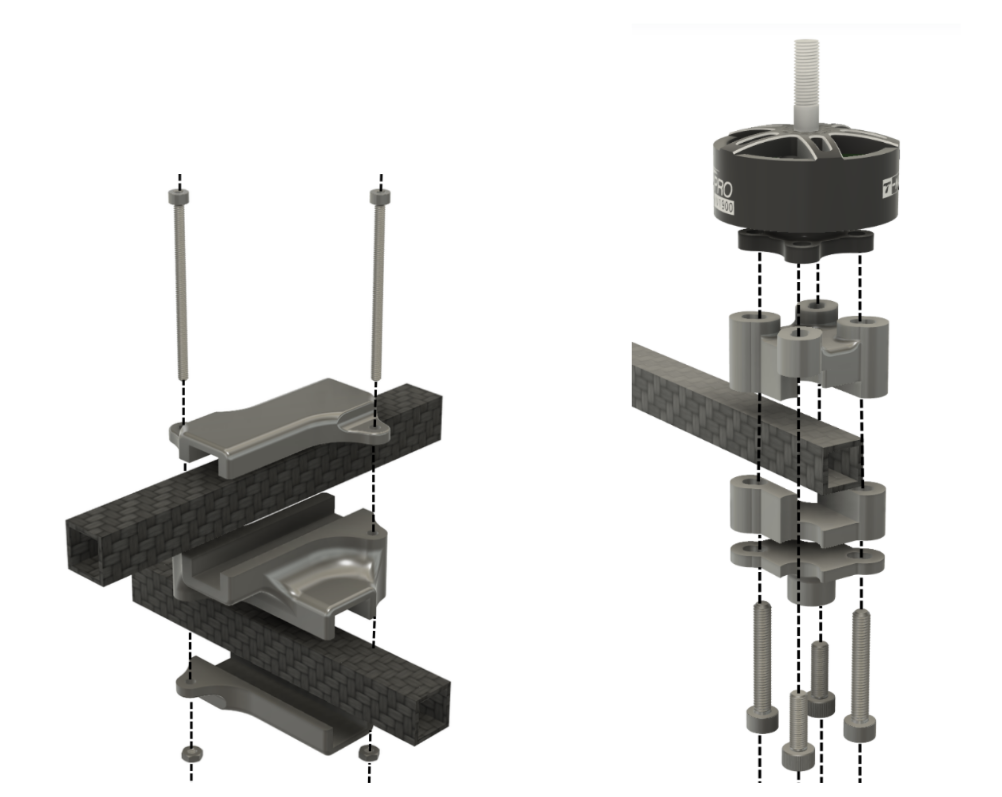
- Architecture centered on a lightweight carbon-fiber spine + quad hover propellers + a dedicated forward propulsion motor.
- Wing deployment is actuated independently, with limit switches for end positions and a dedicated microcontroller.

Wing Mechanism
Compact folding without sacrificing airfoil shape.
Compact hover configuration to maneuver in cluttered spaces and pass through tight gaps. Two families were explored: fabric-based concepts (high folding ratio but weak profile stability) vs. rigid-cell concepts (heavier but true aerodynamic shape). The final design adopts rigid cells with a scissor linkage and mechanical nesting to keep the surface continuous when deployed.
- Airfoil: NACA 4418, chord 250 mm; span 1.5 m split into 12 rigid cells (125 mm each).
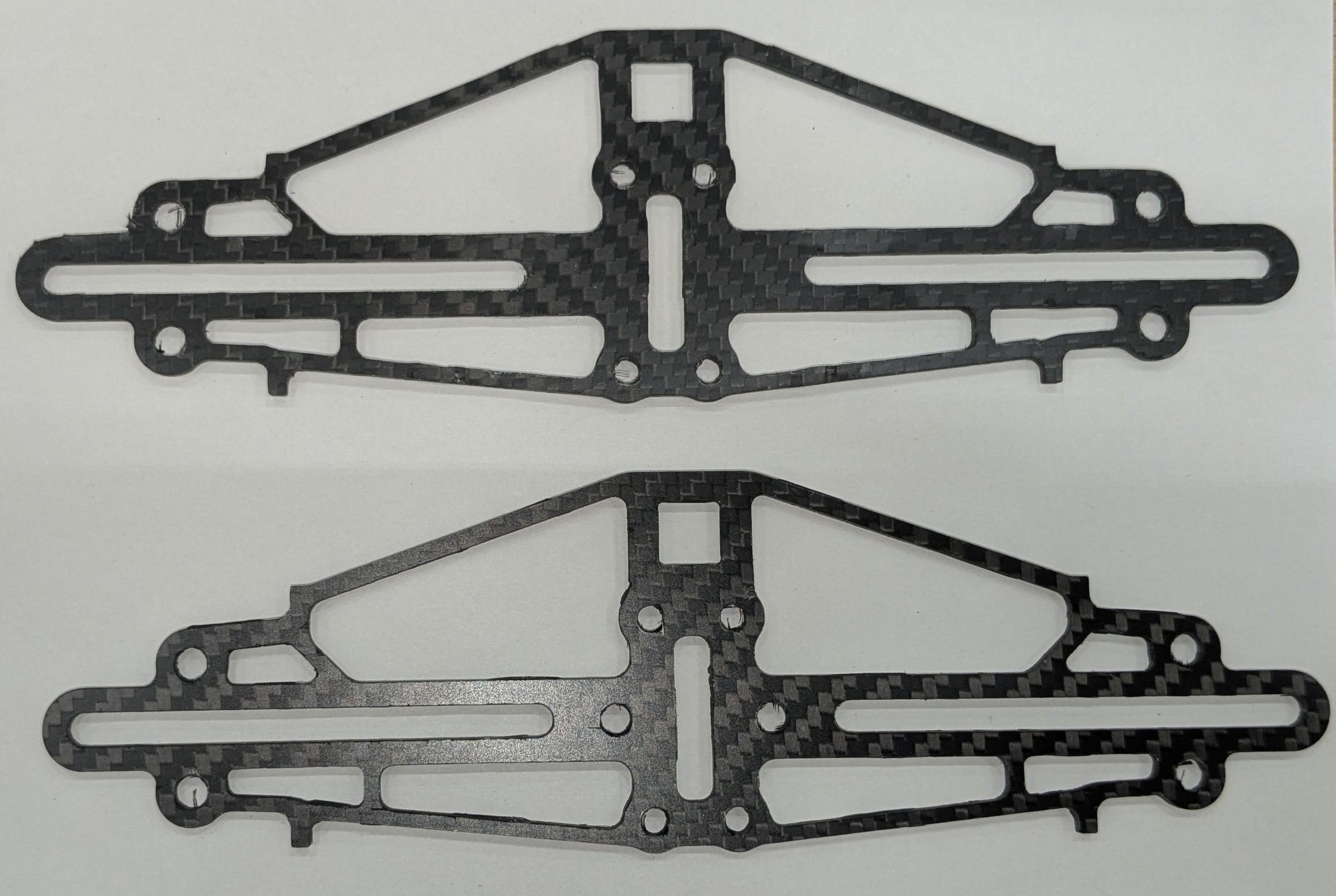
- Structure: PET-CF printed aerodynamic shells + CNC carbon-fiber linkages; interlocking (“nesting”) cells improve torsional rigidity and reduce gaps.
- Mechanics insight: internal loads scale like 1/sin(γ); design iteration increased deployment angle from 8° to 12° (≈33% internal load reduction).

Actuation & Electronics
Fast, low-energy deployment—decoupled from flight loads.
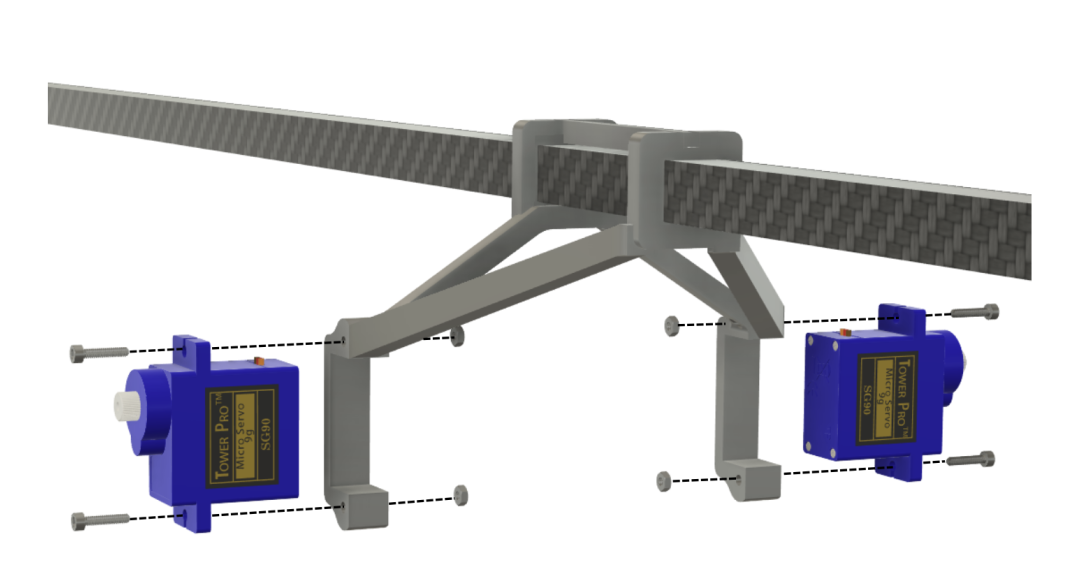
- Deployment driven by a micro gearmotor and a double reverse lead-screw so both wings deploy symmetrically.
- Load path is designed so aerodynamic forces go through structural sliders into the fuselage (not into the lead screw/motor).
- Measured/estimated deployment: ~10 s full deployment under controlled over-voltage; energy per deployment cycle ≈ 21.5 J.
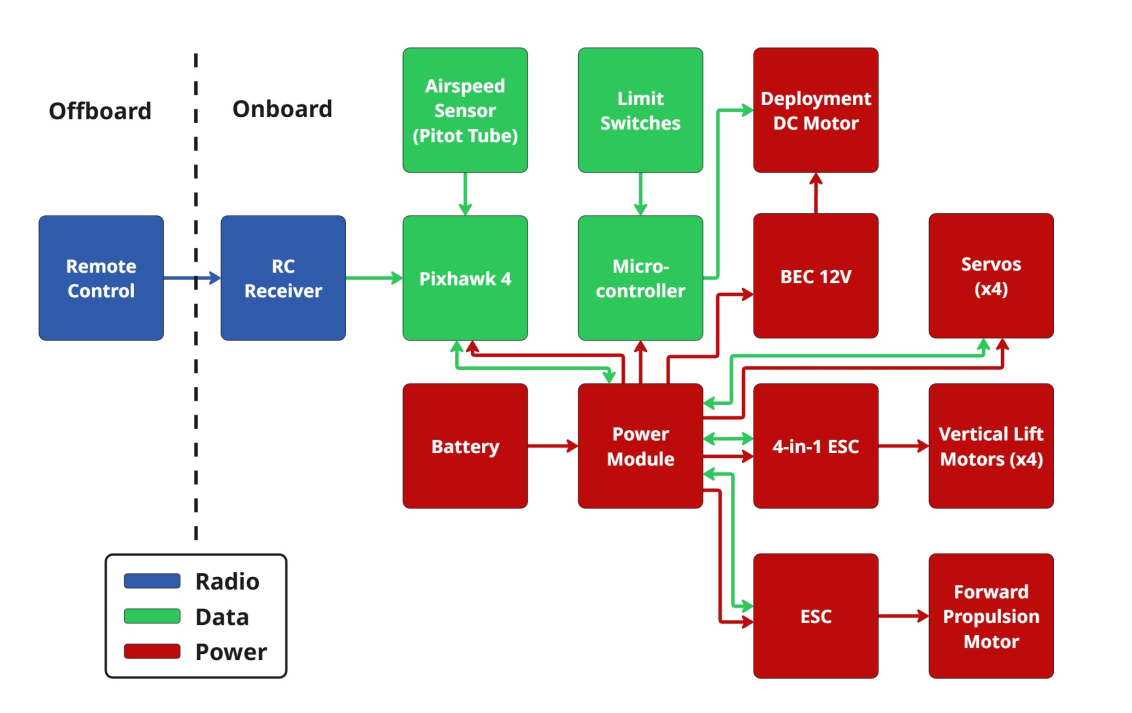
- Flight stack: Pixhawk autopilot + RC receiver; separate microcontroller for deployment sequencing (limit switches).
Aerodynamics & Validation
CFD + WindShape experiments to quantify lift, losses, and control authority.
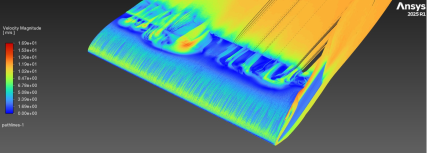
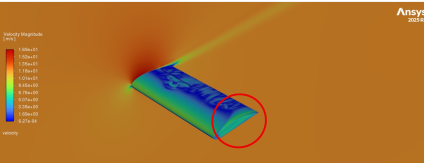
The team combined CFD-based sizing with wind-shape testing to verify that the retractable architecture still behaves like a real wing (and to measure the penalty from inevitable openings and discontinuities).
- Flap effectiveness was experimentally confirmed: flap-down increases lift, flap-up generates downforce (control authority works as intended).
- Lift comparison against an XPS reference wing shows the retractable wing stays close in performance; relative lift error remained below ~18% across tested angles of attack (except α = 0°).
- CFD highlighted a key loss mechanism: openings and cavities can bleed flow through the structure, reducing lift and locally disturbing the boundary layer.
Results
A validated morphing-wing concept, and a clear path to flight readiness.
The prototype validated the core promise: a mechanically robust, repeatable retractable-wing system with measurable aerodynamic performance and functional integrated flaps.
The main blocker shifted from ‘can the wing deploy and generate lift?’ to ‘can the vehicle safely hover and transition at the final mass?’
- Final configuration reached ~2.6 kg, and early-stage motor sizing became insufficient for safe VTOL hover, so free-flight VTOL tests were not performed.
- Ground testing validated repeated deployment/retraction using the RC command chain and verified electronics reliability.
- Early flight trials (on the lighter platform stage) demonstrated maneuverability and even traversal through a window-sized opening, but also revealed vibration and roll-axis stability issues.